給細胞“送快遞”?中國科學家打造多功能3D微納機器人
想象一下,在比頭髮絲還要細的尺度上,有一雙靈巧的“手”正在忙碌地工作——它能夠精準地抓取微小顆粒,將其運送到指定位置,然後輕柔地釋放。這不是科幻電影中的場景,而是中國科學院理化技術研究所科研人員的最新成果。這個僅有40微米大小的3D手型微納機器人,正在刷新我們對微觀世界操控能力的認知。
微觀世界的精密挑戰
在顯微鏡下的世界裏,一切都變得不同尋常。水滴變成了汪洋大海,灰塵化作了巨石,而想要在這個尺度上進行精密操作,就如同戴着厚重的手套去穿針引線。長期以來,科學家們一直夢想着能夠在微觀尺度上實現如同宏觀世界般靈活自如的操控能力。這不僅僅是技術上的挑戰,更關係到精準醫療、靶向藥物遞送、細胞操控等諸多前沿應用領域的突破。
傳統的微納機器人往往面臨着一個困境:要麼功能單一,只能響應單一的外部刺激;要麼結構複雜但難以精確控制。就像一個只會單一動作的機械臂,雖然能夠完成特定任務,卻無法應對複雜多變的工作環境。如何讓微納機器人既能感知環境變化,又能精準執行復雜動作,成爲了擺在科研人員面前的一道難題。
中國科學院理化技術研究所會同北京石油化工學院,提出了一個創新性的解決方案:通過多材料集成和模塊化設計,賦予微納機器人多重響應能力。聯合研究團隊共同打造了這個具有劃時代意義的微型“快遞員”。
材料的智慧:雙響應系統的巧思
這個微納機器人的獨特之處,在於它巧妙地整合了兩種不同的智能材料系統。就像人的大腦和肌肉分工協作,機器人的頂部和底部分別承擔着不同的功能。
頂部的pH響應模塊,採用了含有2-(二甲氨基)乙基甲基丙烯酸酯(DMAEMA)的特殊光敏樹脂。這種材料中的叔胺基團就像一個靈敏的化學傳感器,能夠感知周圍環境的酸鹼變化。當環境變酸時,叔胺基團會發生質子化,帶上正電荷,相互之間產生靜電排斥,導致聚合物鏈條舒展開來,吸收更多水分而膨脹。這個過程就像海綿遇水膨脹一樣自然,卻又精確可控。當加入鹼性溶液中和後,結構又會恢復原狀,實現可逆的開合動作。
底部的磁響應模塊則採用了另一套材料體系。研究人員首先合成了Fe₃O₄納米顆粒,並用硅烷偶聯劑MPS對其表面進行修飾,提高了納米顆粒在有機體系中的分散性和穩定性。這些經過精心處理的磁性納米顆粒被均勻分散在光敏樹脂中,形成了可以被飛秒激光直接加工的磁性前驅體。通過局部高功率激光處理,鐵含量可以達到45.71%的重量百分比,賦予整個微納機器人強大的磁響應能力。
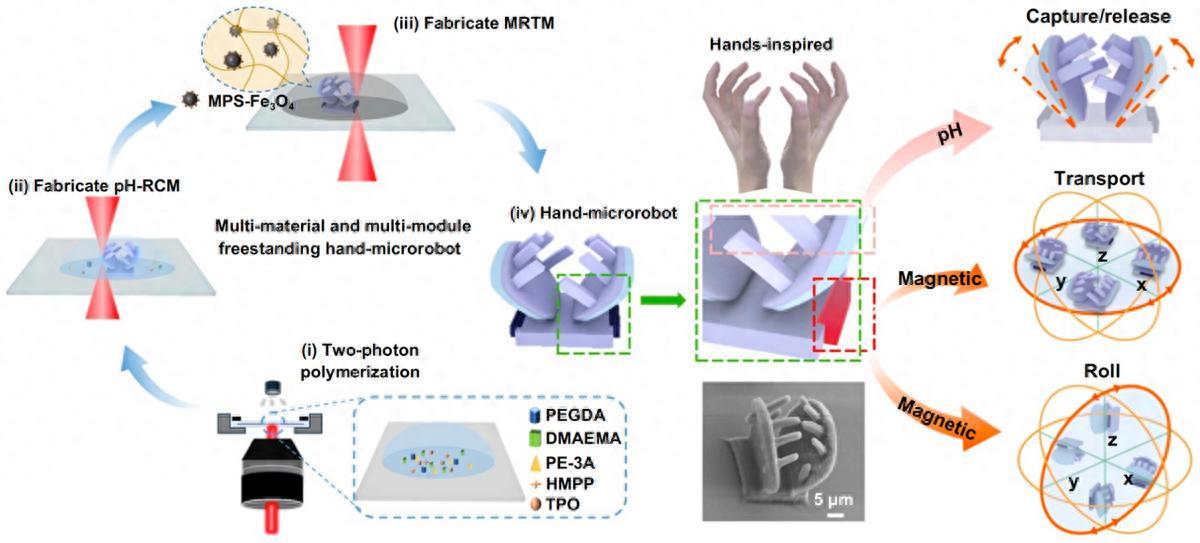
多材料、多模塊自由支撐“手形”微型機器人的飛秒激光直接寫入製備示意圖
(圖片來源:參考文獻1)
飛秒激光的精密雕刻
如何在如此微小的尺度上製造出結構複雜、功能精密的機器人?答案是飛秒激光直寫技術。這項技術就像是一支能在微觀世界作畫的神奇畫筆,通過雙光子聚合原理,可以在三維空間中逐點“繪製”出所需的結構。
整個製備過程分爲兩個關鍵步驟。首先,研究人員將含有DMAEMA的光敏樹脂滴入兩片玻璃片之間的空腔中,然後用780納米波長的飛秒激光按照預先設計的三維模型進行逐點掃描。激光聚焦處的光敏樹脂發生聚合反應,形成固化的聚合物網絡。通過精確控制激光的掃描路徑和功率,可以在“手掌”結構的內外兩側形成不同的交聯密度。內側經過重複掃描,交聯密度更高,在酸性環境中膨脹程度較小;外側交聯密度較低,膨脹程度更大,從而實現了“手掌”的自動開合。
第二步是磁驅動模塊的局部製備。激光焦點調整到微機器人的底部,滴加含有磁性納米顆粒的前驅體,通過快速掃描將大量磁性納米顆粒固定在指定位置。這種局部製備的方法突破了傳統全磁性結構的限制,大大減少了磁性材料的用量,同時保持了良好的可控性。
微觀世界的靈活舞者
完成製備的手型微納機器人展現出了令人驚歎的運動能力。在外部磁場的引導下,它可以在溶液中自由遊動,平均速度達到15.6微米每秒。雖然這個速度在宏觀世界看來微不足道,但在微觀尺度上已經相當可觀——相當於它每秒可以移動接近半個身位的距離。
更令人印象深刻的是它的靈活性。通過改變磁場的方向和強度,微納機器人可以實現上下左右的平面運動,還能夠進行順時針和逆時針的旋轉。當遇到障礙物時,它甚至可以通過翻滾的方式越過障礙,就像一個訓練有素的體操運動員。這種三維空間的自由運動能力,爲其在複雜微環境中的應用奠定了基礎。
研究人員通過磁滯回線測量證實,所使用的Fe₃O₄納米顆粒在室溫下表現出超順磁性,即在沒有外部磁場時不會保留磁性。這一特性確保了微納機器人在停止工作時不會相互吸引聚集,保持了良好的可控性和重複使用性。
從微粒到細胞的精準遞送
這個微型“快遞員”最引人注目的應用是對微小物體的精準操控。研究團隊首先用直徑10微米的聚苯乙烯微球進行了測試。整個捕獲、運輸和釋放過程就像一場精心編排的舞蹈:當微球落入張開的“手掌”中後,滴加酸性溶液(pH=6),“手掌”在5秒內迅速閉合,將微球牢牢抓住;隨後在磁場引導下,攜帶着“貨物”的機器人遊向目標位置;到達目的地後,滴加鹼性溶液(pH=10),“手掌”重新張開,完成貨物的釋放。
更具挑戰性的是對活細胞的操控。研究人員選擇了786-O細胞(人腎透明細胞癌細胞)進行實驗。與被動等待微球落入不同,對細胞的捕獲需要更加主動的策略。微納機器人可以在磁場控制下主動接近目標細胞,通過擺動調整姿態,然後在合適的時機通過pH變化實現捕獲。令人欣慰的是,經過捕獲、運輸和釋放的完整操作流程後,細胞存活率達到了97.76%,證明了這種操控方式的溫和性和生物相容性。
研究團隊還進行了生物相容性的系統評估。他們用DMAEMA光敏樹脂製備了90微米×90微米×3微米的立方體結構,用於L929細胞(小鼠成纖維細胞)的培養。24小時後,細胞在結構上生長良好,細胞核和線粒體的熒光染色顯示細胞保持着健康的生理狀態,證實了材料良好的生物相容性。
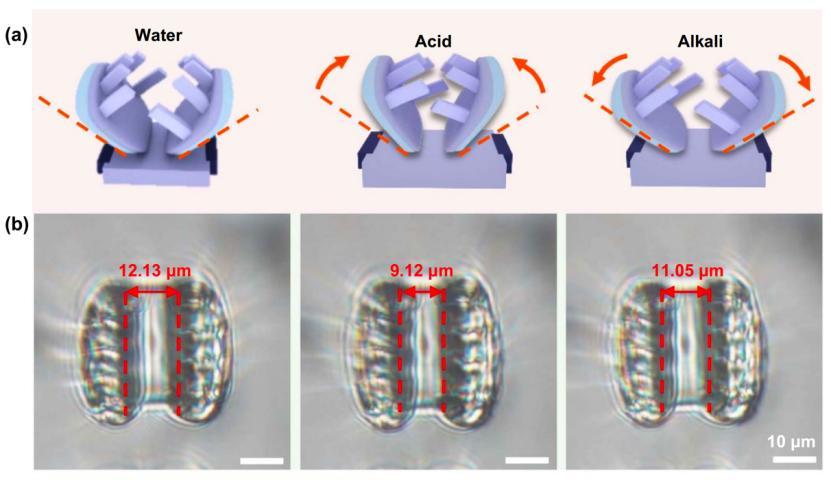
手形微型機器人 pH 響應模塊(pH-RCM)的表徵
(a)、(b) 分別爲手形微型機器人 pH 響應模塊在酸性與鹼性環境下的示意圖和光學圖像。該模塊類似於“手掌”結構,在酸性溶液中閉合,加入鹼性溶液後則張開。
(圖片來源:參考文獻1)
模塊化設計的無限可能
這項研究最具創新性的貢獻之一,是提出了模塊化的設計理念。磁驅動模塊可以被局部製備在任何預先製作的靜態微結構上,賦予其運動能力。這就像是給靜止的雕塑安裝上了發動機,讓它們瞬間獲得了生命力。
研究人員還展示了不同姿態的手型微納機器人——側臥式和直立式,它們都能夠成功捕獲細胞。這種設計的靈活性意味着,未來可以根據不同的應用需求,定製各種形狀和功能的微納機器人。比如,可以設計成鉗子形狀用於夾取,設計成籠狀用於包裹,或者設計成螺旋形用於鑽進狹窄空間等等。
更進一步,研究團隊展望了多個微納機器人協同工作的可能性。通過合理調整磁響應模塊的位置和強度,可以實現多個機器人的集體運動控制,完成更加複雜的任務,如協同搬運大型物體或在不同位置同時進行操作。
微觀操控的美好前景
站在這項突破性成果的基礎上展望未來,我們可以想象出許多激動人心的應用場景。在精準醫療領域,這些微納機器人可以攜帶藥物直達病竈,實現真正的靶向治療;在細胞工程中,它們可以精確操控單個細胞,輔助完成細胞注射、融合等精密操作;在環境治理方面,大量的微納機器人可以協同工作,清除水體中的微塑料污染。
這項研究工作不僅在技術上實現了重要突破,更爲微納機器人的設計提供了新的思路。通過巧妙的多材料集成和模塊化設計,他們成功地解決了單一材料系統功能受限的問題,爲微納機器人賦予了更強大的環境感知和執行能力。
當我們把目光從宏大的宇宙轉向微小的世界,會發現那裏同樣充滿了無限的可能。這雙在微觀世界中靈巧工作的“手”,正在爲人類打開通向更精密、更智能的未來之門。或許在不久的將來,當醫生需要在你的身體內進行精密治療時,這些忠實的微型“快遞員”就會悄然啓程,完成它們的神聖使命。
參考文獻:
【1】Jian-Miao Zhang et al 2026 Int. J. Extrem. Manuf. 8 015509
出品:科普中國
作者:李瑞(半導體工程師)
監製:中國科普博覽