批量將蟑螂改造爲機器人…?先別划走!應用前景超乎想象!
如果告訴你,科學家能在68秒內把一隻普通蟑螂變成可遠程控制的“生物機器人”,你會相信嗎?這不是科幻電影的情節,而是剛剛發表在《自然·通訊》上的真實研究成果。
2025年7月28日,新加坡南洋理工大學的研究團隊向世界展示了一項革命性技術:全球首條昆蟲-計算機混合機器人全自動生產線。這條生產線能夠以前所未有的速度和精度,將活體昆蟲改造成具有可控運動能力的“半機械生物”。更令人震撼的是,整個改造過程完全自動化,從固定昆蟲到完成組裝,僅需68秒。
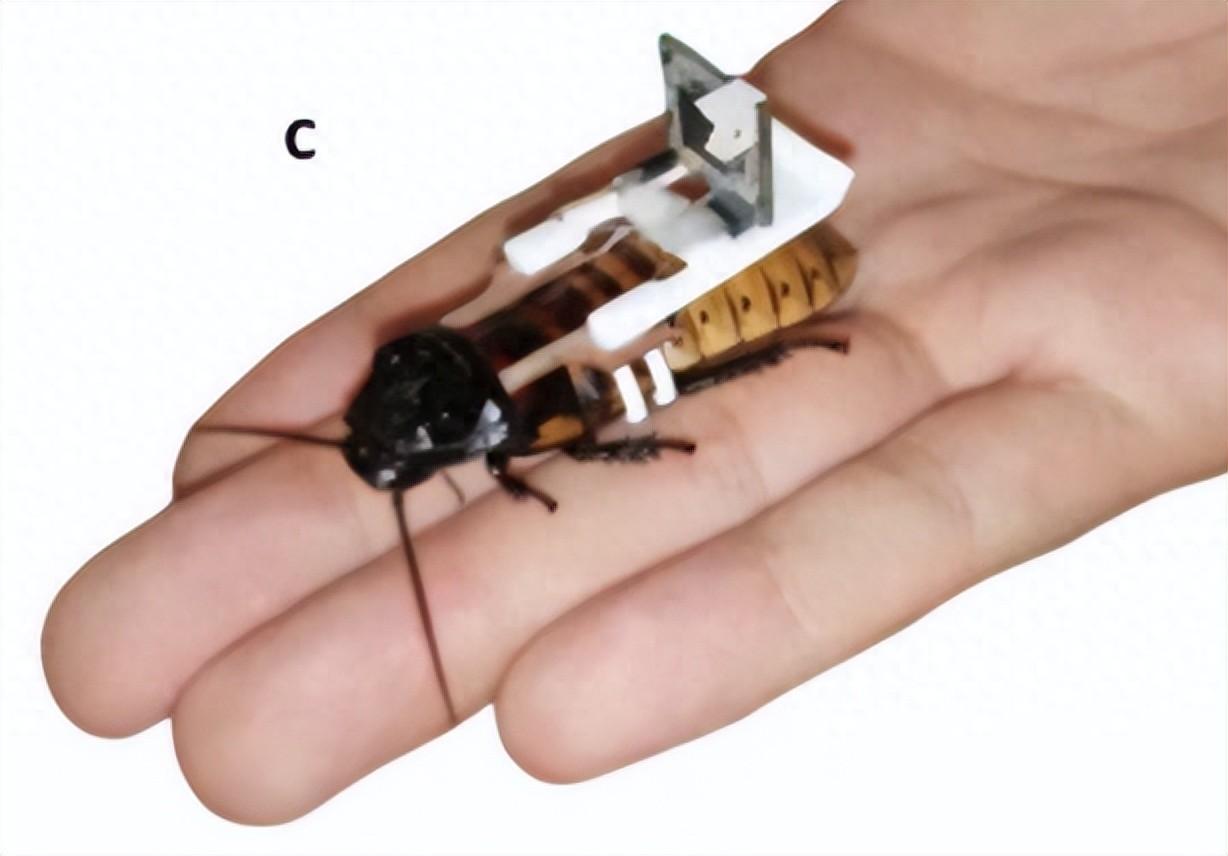
研究人員手中的半機械蟑螂,背上是控制揹包
(圖片來源:參考文獻1)
爲什麼是蟑螂?——大自然的“最優選”
在尋找理想的生物平臺時,研究團隊將目光投向了一種特殊的生物——馬達加斯加蟑螂。這種世界上最大的蟑螂之一,成年個體身長可達5-7cm,體重6-8g,看似平凡的外表下隱藏着驚人的能力。
蟑螂擁有工程師們夢寐以求的幾大“超能力”:
超長待機:能源系統完全自給自足,通過簡單的進食就能獲得持續數天的動力,而同等大小的機械機器人往往在幾十分鐘後就會電量耗盡。
極限縮骨:能將身體壓縮到原始高度的四分之一,穿過僅有幾毫米的縫隙,這種柔性變形能力是當前任何微型機器人都望塵莫及的。
超強負載:儘管體重輕巧,卻能攜帶相當於自身體重兩倍的負載(約15克),足以加裝各種傳感器和通信設備。
生存專家:耐高溫、耐輻射、耐缺氧,這些特性使蟑螂成爲執行危險任務的理想平臺。
控制的突破:從“觸角”到“關節”
傳統的昆蟲控制方法,需要在昆蟲纖細的觸角(直徑僅 0.6 mm)上植入電極,操作難度極大,就像試圖在一根頭髮絲上進行精密手術,成功率低且容易損傷昆蟲的感知系統。
研究團隊的突破性創新改變了遊戲規則。他們首次將控制點從脆弱的觸角轉移到了蟑螂前胸與中胸之間的彈性薄膜上。這塊薄膜就像是大自然爲科學家預留的接口,不僅面積更大、位置固定,而且與控制前肢運動的神經系統直接相連。
爲了利用這個發現,團隊開發了獨特的Y形雙極電極。當3V的電脈衝通過電極傳導時,神奇的事情發生了:刺激右側電極,蟑螂會向左轉;刺激左側,則向右轉;同時刺激兩側,蟑螂則會減速。整個響應時間僅需0.4秒,這種精準快速的控制此前從未實現過。
68秒的“智造”奇蹟:從手工作坊到智能工廠
將實驗室的成功轉化爲可批量生產的技術,是這項研究最大的亮點。傳統的人工組裝需要經驗豐富的研究人員在顯微鏡下細心操作15分鐘,成功與否很大程度上取決於操作者的技術水平和當天的狀態。
全新的自動化系統徹底改變了這一切。系統的核心是一套精密的視覺定位技術,採用深度學習算法訓練的TransUNet模型,通過分析6570張標註圖像,學會了識別不同體型蟑螂的解剖結構。它就像一個訓練有素的解剖學家,即使面對從未見過的個體,系統也能在3秒內準確定位植入點,精度達到亞毫米級。
機械臂的精準操作令人歎爲觀止。Universal Robots UR3e機械臂的重複定位精度達到0.03mm,比人的手穩定百倍。它輕柔地抓取僅重2.3g的電子揹包,像外科醫生握着手術刀,每一個動作都經過精確計算和優化。
最巧妙的是自適應固定系統。兩根精密定位杆分別壓住蟑螂的不同部位,使目標薄膜完美暴露。系統會根據每隻蟑螂的體型自動調節壓力和角度,確保既能穩定固定,又不會造成傷害。這種個性化的處理方式,是人工操作難以達到的。
從麻醉後的蟑螂被放置到平臺,到完成全部組裝並釋放,整個過程行雲流水,僅需68秒。對於5.0-6.0cm的標準體型蟑螂,成功率高達86.7%,生產效率提升了13倍。
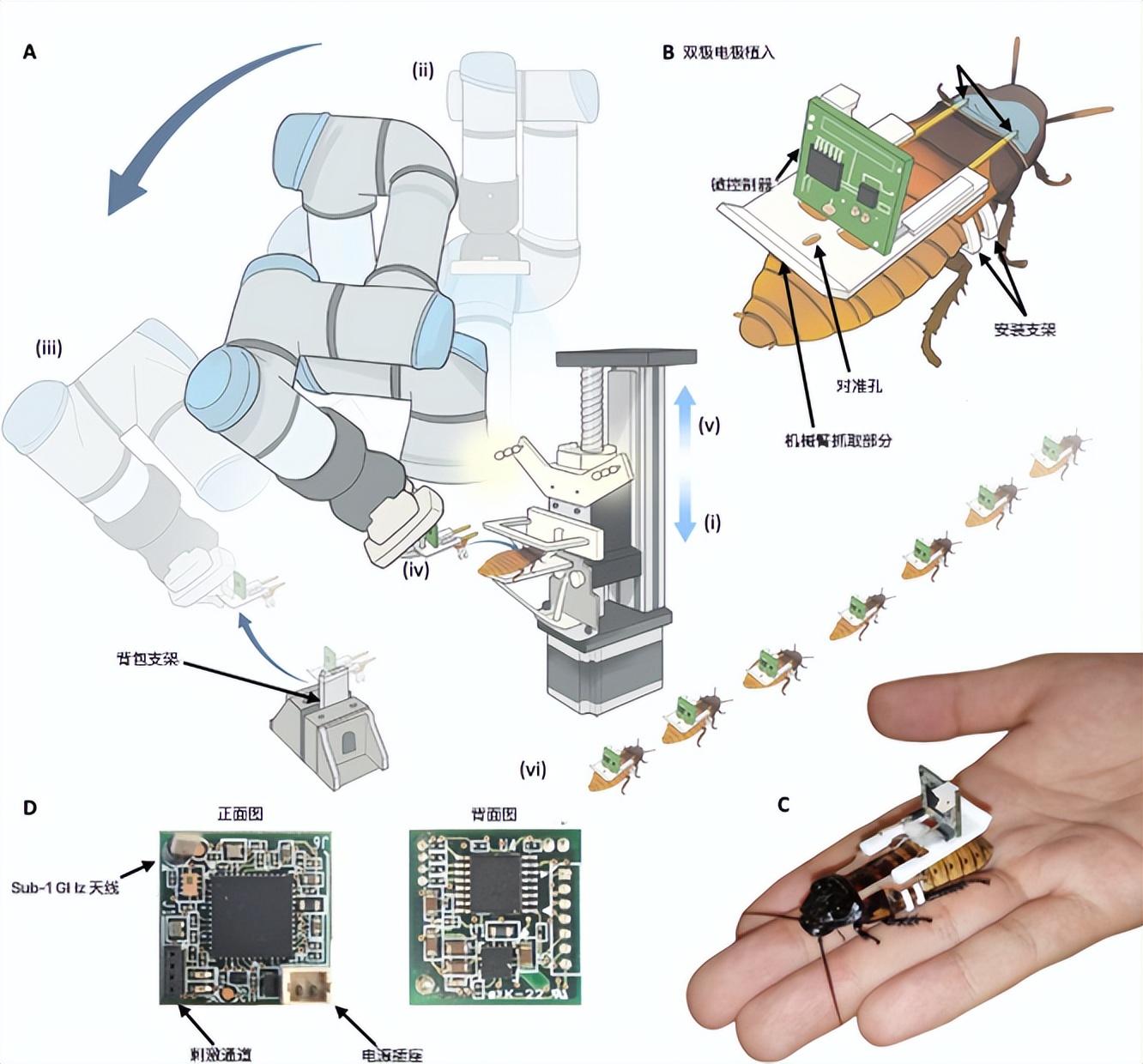
蟑螂改造自動化流水線示意圖,A爲機械臂操作流程,B爲電極植入,C爲成品,D爲電子揹包
(圖片來源:參考文獻1)
羣體智慧的展現:協同作戰的威力
單個半機械蟑螂的能力已經令人印象深刻,但當它們組成團隊時,展現出的協同效應更加驚人。在一個4平方米的模擬災後場景中,研究人員隨機放置了各種障礙物,包括石塊、木板、金屬片等,真實還原了廢墟環境的複雜性。四隻自動組裝的半機械蟑螂被同時投放到場地中,每隻都裝備了超寬帶定位標籤,能夠實時追蹤它們的位置。
實驗開始後,蟑螂們按照預設的程序開始探索。它們沒有複雜的路徑規劃,只是簡單地隨機移動,每10秒接收一次方向調整指令。然而,就是這種看似簡單的策略,產生了驚人的效果。
10分31秒後,統計數據顯示,四隻蟑螂共同覆蓋了場地的80.25%,而單隻蟑螂的最高覆蓋率僅爲45.75%。更重要的是,它們的路徑互補性很強,一隻蟑螂探索過的區域,其他蟑螂會自然地避開,轉向未知區域。這種湧現出的集體智慧,爲未來大規模部署提供了有力支撐。
精密工程背後的科學原理
這項技術的成功離不開多個學科的交叉融合。
材料科學:研究團隊創新性地採用了多材料3D打印技術。普通樹脂提供結構強度,而含有鈀催化劑的活性樹脂則在特定區域形成導電通路。通過精確控制打印參數,他們製造出了既堅固又導電的複合結構。
化學鍍銅工藝:在含有硫酸銅和甲醛的鍍液中,鈀催化劑觸發了銅的選擇性沉積。經過16分鐘的精確控制,形成了厚度爲2.5微米的均勻銅層,電阻低於70歐姆,確保了電信號的有效傳輸。
深度學習算法:TransUNet模型巧妙地結合了卷積神經網絡的局部特徵提取能力和Transformer的全局信息整合能力。通過學習數千張蟑螂圖像,模型不僅能識別前胸的位置,還能理解不同個體間的形態差異,實現了93.3%的分割準確率。
神經生理學:當電極刺激薄膜時,電信號通過神經傳導到前肢肌肉,引起收縮。研究團隊通過記錄神經電信號,優化了刺激參數——3V的電壓既能產生明顯的行爲響應,又不會造成神經損傷。
從實驗室走向現實世界
這項技術的應用前景遠超想象:
災難救援:地震後,數百隻半機械蟑螂可以迅速部署,它們攜帶生命探測器、氣體傳感器、微型攝像頭,深入人類和搜救犬無法進入的縫隙搜尋生命跡象。
工業檢測:它們可以輕鬆進入城市地下管網,檢測泄漏點、評估腐蝕程度、發現堵塞位置。
環境監測與軍事應用:在高危區域(如核電站、化工廠)定期巡檢,構建森林火災預警網絡,或進入敵方陣地收集情報。
技術進步與倫理平衡
這項研究不可避免地引發了倫理討論。將活體生物改造成可控制的工具,這種做法是否合適?研究團隊對此有深入的思考和嚴格的規範。
所有實驗都在嚴格的動物福利框架下進行。蟑螂在操作前會被二氧化碳麻醉,確保它們不會感到痛苦。電極的植入是微創的,不會對蟑螂的基本生理功能造成永久損害。實驗結束後,設備可以被移除,蟑螂也能恢復正常生活。
更重要的是,我們需權衡利弊。這項技術的最終目的在於拯救生命、保護環境、提高人類福祉。在關鍵時刻,一隻半機械蟑螂可能意味着一條人命的挽救,或一次環境災難的避免。從這個角度看,技術的價值可能遠超過潛在的倫理顧慮。
研究團隊同時也在探索更加人道的方案。未來有望開發出完全無創的控制方法,比如通過光遺傳學技術,利用光信號而非電信號來控制昆蟲行爲。同時,他們還在研究如何讓昆蟲在執行任務時獲得“獎勵”,從而建立一種互利共生的關係。
生物與技術融合的新紀元
僅僅68秒就造出一隻活體機械蟑螂,這個數字不僅標誌者生產效率的提升,更體現了人類對生命系統理解和利用能力的飛躍。我們正站在一個新紀元的門檻上,生物與技術的界限正在消融,這種混合系統展現出前所未有的潛力。
未來的發展方向同樣令人期待。研究團隊正在開發更小型化的控制系統,目標是將電子揹包的整體重量降到1克以下。新一代的電極將採用柔性電子技術,能與昆蟲身體更好地貼合。人工智能算法將賦予半機械昆蟲自主決策能力,使它們能夠獨立完成複雜任務。
這項研究的成功也爲其他生物機器人的開發鋪平了道路。科學家們正在探索將類似技術應用於甲蟲、蜻蜓、甚至更復雜的小型哺乳動物。每種生物都有其獨特的優勢,通過技術增強,它們將在不同領域發揮獨特作用。
當科幻變成現實,當生命與機器融合,我們看到的不是自然的終結,而是進化的新篇章。這些半機械生物不是要取代自然,而是要增強我們與自然合作的能力,以共同應對人類面臨的挑戰。從實驗室的第一隻改造蟑螂,到如今的自動化生產線,這段旅程展現了科學創新的巨大力量。這,僅僅是一個開始。
參考文獻:
- Cyborg insect factory: automatic assembly for insect-computer hybrid robot via vision-guided robotic arm manipulation of custom bipolar electrodes
出品:科普中國
作者:郭菲(煙臺大學)
監製:中國科普博覽