戴上這種手套,輕鬆搬動200公斤石板!這就是手部外骨骼系統
輕鬆舉起千噸級物體,隨意就能將巨石拋至太空——你有沒有被電影中綠巨人這樣的超級力量所震撼過?但或許,獲取這樣的“超能力”並不是夢。在中國科學技術大學人形機器人研究院的實驗室裏,一雙看似普通的黑色機械手套正在改寫人類體能的極限。
當實驗者戴上它,原本需要多人合力才能搬動的200公斤石板,一個人就能輕鬆翻起;在單槓上的懸掛時間從不到兩分鐘延長到近三分鐘;連續搬運重物時的肌肉疲勞感大幅降低。這不是科幻電影中的道具,而是中國科學技術大學特任教授孫帥帥課題組與合作者聯合研發的,基於磁流變技術的手部外骨骼系統。
這項發表在國際機器人學頂級期刊《IEEE機器人學彙刊》上的研究成果,代表着機器人領域的重大進展。要知道,該期刊每年全球發文量僅約200篇,接收率極低,能夠在此發表意味着研究達到了國際領先水平。
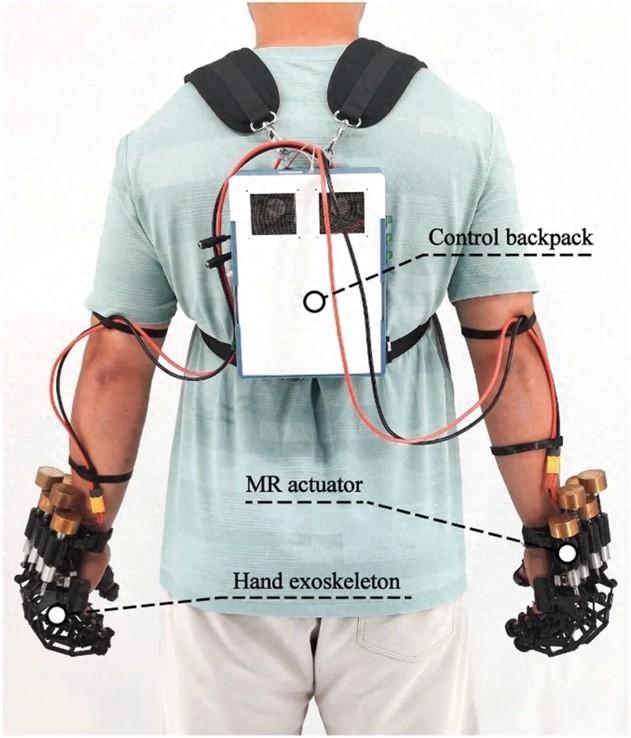
控制揹包、磁流變制動器以及手部外骨骼共同構成了整個系統
(來源:參考文獻[1])
從實驗室到廢墟:一個關於力量的故事
地震後的廢墟現場,時間就是生命。大型機械設備難以進入狹窄空間,救援人員只能依靠雙手清理瓦礫、搬開石板。然而,人類的體力是有限的。長時間的高強度作業不僅效率低下,更可能因疲勞導致二次事故。如何在不依賴外部大型設備的情況下,讓救援人員獲得超越自身極限的力量,成爲了科研工作者思考的問題。
傳統的解決方案多采用電機驅動的外骨骼系統。然而,這些系統普遍存在輸出力小、體積大、重量大的問題。即使是目前最先進的電機驅動外骨骼,單個手指的輔助力通常只有20牛左右,最大也不過10牛每指(也就是單手力量增加5公斤左右),在幾百公斤的石板面前,根本不夠看。
孫帥帥團隊另闢蹊徑,將目光投向了一種特殊的智能材料——磁流變材料。這種材料在20世紀40年代被發現,但直到近年來纔在高端裝備領域嶄露頭角。它像是擁有了“變形”能力,可以在液態和固態之間自由切換:沒有磁場時,材料中的磁性顆粒隨機分佈,整體呈現流動性;一旦施加磁場,這些顆粒會沿着磁力線方向排列成鏈狀結構,材料的剪切應力瞬間增大,變成半固體狀態。
基於這種特性,研究團隊創新地設計了磁流變軸承和滾珠絲桿結構的被動致動器。在僅需5瓦功耗下,系統就能實現最高1046牛的輸出力。這個數字意味着什麼?一個成年人的體重大約是700牛,1046牛足以支撐一個半成年人的重量!更重要的是,相比傳統方案,磁流變系統的“力-功率比”提升了整整一個數量級。
不插電的超能力:人體動能成“祕密能源”
這套外骨骼系統最令人驚歎的設計,是它能夠在不需要外部電源的情況下增強握力。這聽起來似乎違背了能量守恆定律,但實際上,這是系統巧妙地利用了人體自身的動能。
當使用者快速握拳時,手指的線性運動通過滾珠絲桿轉換爲螺母和飛輪的旋轉運動。這個過程就像給發條玩具上弦,將動能儲存在旋轉的飛輪中。當需要發力時,儲存的旋轉能量又通過滾珠絲桿反向轉換,產生強大的軸向推力,從而增強握力。整個過程無需任何外部能源,完全依靠人體自身的運動能量。
研究團隊通過精密計算,發現在典型的快速握拳動作中(速度約80毫米/秒),系統能夠產生約91.7牛的理論增強力。而在實際測試中,6名實驗者的平均握力增強到85.8牛,提升幅度爲41.8%。考慮到機械傳動中不可避免的摩擦損耗,82.2%的能量轉換效率其實已經相當可觀。
這種設計的巧妙之處在於,它將原本會浪費掉的動能收集起來,在需要的時候釋放。就像混合動力汽車的制動能量回收系統一樣,每一次握拳動作都不會白費,而是爲下一次發力做準備。
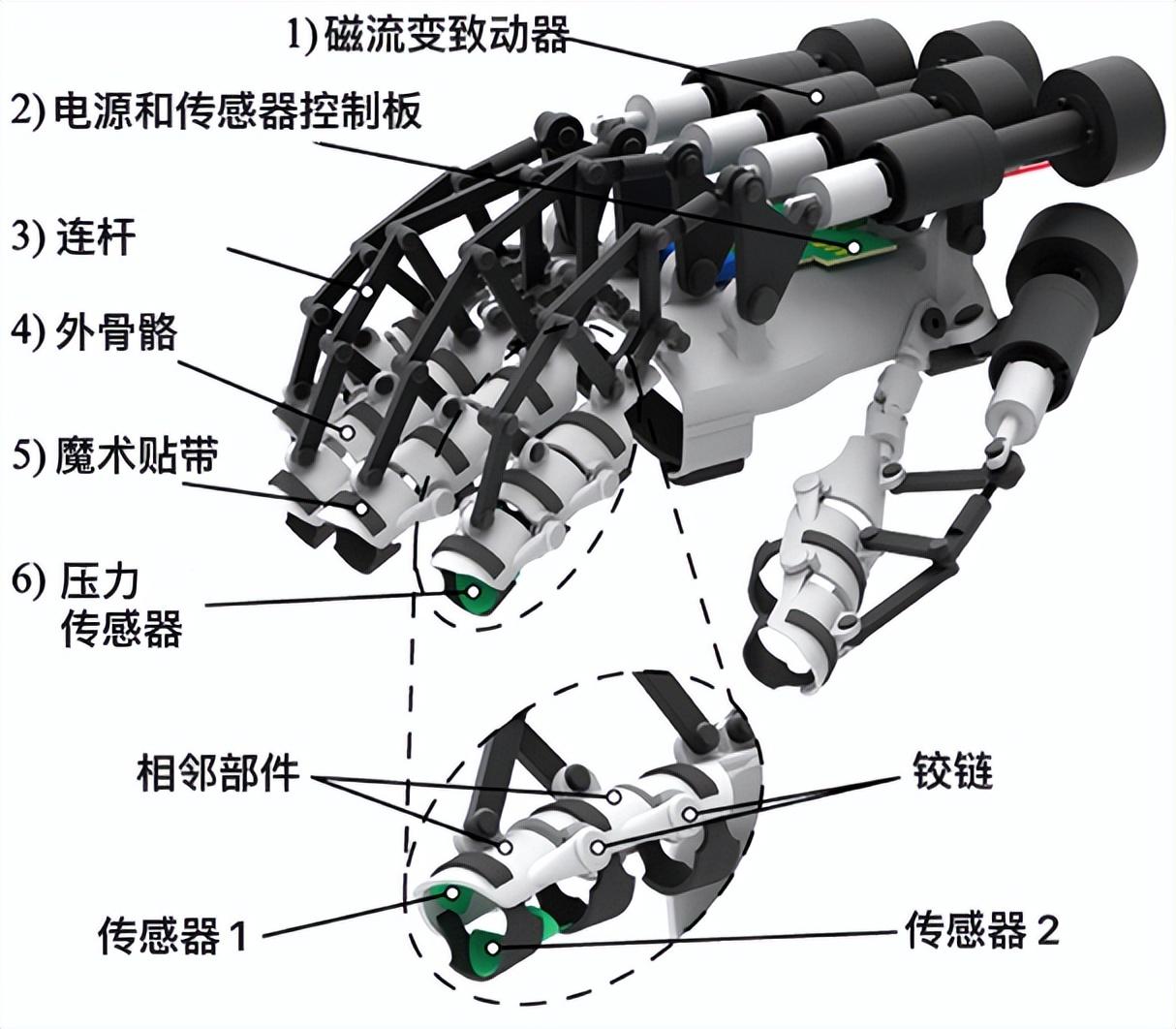
磁流變手部外骨骼系統的機械結構分解圖
磁流變致動器:提供力量增強的核心部件
電源和傳感器控制板:負責能量轉換和傳感器數據處理
連桿:在致動器和外骨骼之間傳遞力
外骨骼:包覆手部的框架結構
魔術貼帶:將手指固定到外骨骼上,確保同步運動
壓力傳感器:檢測抓握意圖,位於食指指尖的背側和腹側
(來源:參考文獻[1])
磁流變的魔法:毫秒間完成的軟硬“變形”
磁流變材料的響應速度是這套系統成功的關鍵。從施加磁場到材料變硬,整個過程只需要幾毫秒。這種近乎瞬時的響應,讓系統能夠精準地配合人體動作。
爲了讓材料既有力又靈活,研究團隊在材料配比上下足了功夫:磁性顆粒含量太少,鎖定力不夠;含量太多,零磁場下的阻力又會影響手指靈活性。通過系統的實驗對比他們發現,40%的顆粒質量分數是最優選擇。在這個配比下,磁流變軸承在0.5特斯拉磁場強度下能產生足夠的鎖定力矩,而在零磁場時的阻力僅爲12牛,不會明顯影響手部活動。
磁路設計也同樣精妙:線圈被巧妙地安置在內套筒外側,恰好位於兩個軸承之間。這種佈置讓磁力線能夠集中穿過磁流變軸承,形成閉合磁路。通過COMSOL多物理場仿真,研究團隊優化了磁路結構,確保每一分電能都能高效轉化爲磁場能量,不浪費。
更值得稱道的是系統“按需供能”的智能控制策略。通過集成在指尖的壓力傳感器,系統能夠實時檢測使用者的抓握意圖。當兩個傳感器同時受壓時,判定爲抓握動作,系統自動供電提供支撐;當腹側傳感器壓力降低時,判定爲鬆手,系統斷電並執行消磁程序。如此以來,一塊2500毫安時的電池就能支持數小時的連續使用。
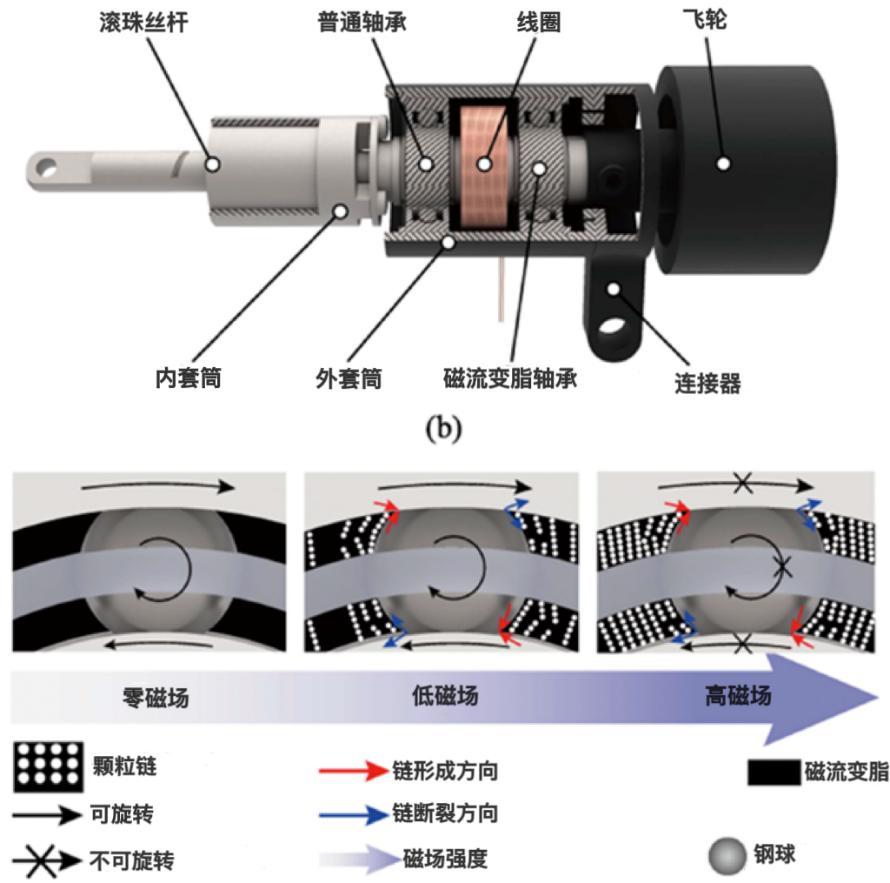
磁流變致動器的核心結構和工作原理
其核心是磁流變材料在不同磁場下的狀態變化——零磁場時顆粒隨機分佈可自由旋轉,施加磁場後顆粒形成鏈狀結構限制旋轉
(來源:參考文獻[1])
實戰見真章:多維度性能驗證
實驗室數據再好,不如實戰檢驗。研究團隊設計了一系列貼近實際應用的測試場景。這些測試不僅驗證了系統的性能,更揭示了其在真實世界中的巨大潛力。
在持續提重實驗中,5名實驗者雙手各提20公斤重物,保持100秒。通過採集前臂屈指深肌的表面肌電信號,研究人員發現,佩戴外骨骼後,肌電信號幅值平均降低了60%以上——這意味着完成同樣的任務,肌肉只用不到一半的力。更重要的是,而未佩戴外骨骼時,肌電信號的中值頻率持續下降,這是肌肉疲勞的典型表現;但帶了手套的,中值頻率保持穩定,不易勞累。
單槓懸掛實驗更加直觀地展示了系統的效果。實驗者的懸掛時間從79秒延長到158秒,整整翻了一倍!按照體能訓練的標準,1分鐘以下屬於“初級”水平,1-2分鐘爲“高級”,2-3分鐘則達到“精英”級別——外骨骼讓普通人也能一躍成爲“精英”。
當然,最貼近實際應用的還是地震救援模擬。實驗設置了兩個任務:營救被壓人員和轉運傷員。在營救任務中,實驗者需要搬開壓住“傷員”的大型石板。未佩戴外骨骼時,即使用盡全力,石板也紋絲不動;佩戴後,石板被輕鬆翻起,並且前臂肌電信號降低了70%以上。而在傷員轉運任務中,實驗者抬着60公斤擔架在跑步機上行走。結果顯示,佩戴外骨骼後呼吸頻率降低20%,心率略有下降,最大運送距離從平均500米提升到1100米。
特別值得一提的是連續作業能力測試。實驗者需要連續翻起5塊相同重量的石板,模擬災後清理現場。積分肌電(iEMG)數據顯示,佩戴外骨骼後的肌肉總體活動量降低了52%。這不僅意味着當下的工作更輕鬆,還能夠保持更長時間的工作能力,這在爭分奪秒的救援現場,就可能是多救了一個人的差距。
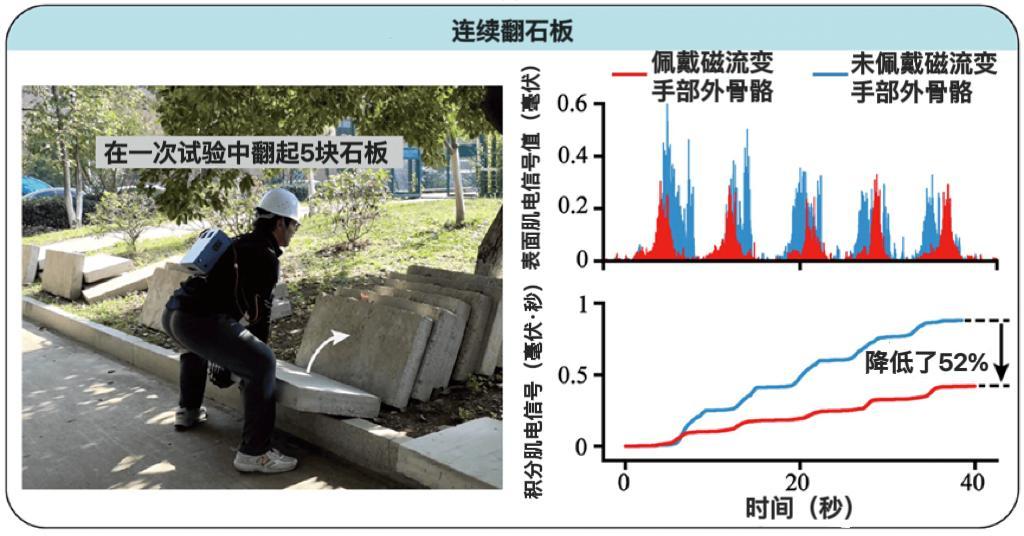
磁流變手部外骨骼系統在連續作業中的效果
表面肌電信號(sEMG):反映肌肉收縮強度,佩戴外骨骼後明顯降低
積分肌電信號(iEMG):反映肌肉總體活動量,佩戴外骨骼後降低52%,表明肌肉疲勞程度大幅減輕
(來源:參考文獻[1])
面向未來:從原型到產品的進化之路
儘管取得了突破性進展,研究團隊也清醒地認識到,從實驗室原型到實用化產品,還有很長的路要走。
目前,這套系統重量約1.7公斤(單手),其中很大一部分來自飛輪和磁路所需的鐵磁材料。未來的優化方向包括採用高性能複合材料減輕結構重量,使用釹鐵硼等強磁材料,讓手套減重提效。
人機交互的改進同樣重要。現有系統主要通過壓力傳感器判斷抓握意圖,未來可以加入肌電信號、關節角度等多模態信息,實現更精準的意圖識別。並且,研究團隊還在探索基於機器學習的控制策略,讓系統能夠適應不同使用者的操作習慣,更加智能化。
製造工藝的提升也在計劃之中。3D打印技術的應用將大大降低生產成本,同時能根據使用者手部尺寸進行定製化設計。模塊化設計理念的引入,讓飛輪、致動器等部件可以根據不同應用場景靈活配置。
手部外骨骼只是開始,基於同樣的磁流變技術,還可以開發肘部、肩部乃至全身的增強裝備。這些裝備可以相互配合,形成一個協調的增強網絡,讓使用者獲得全方位的能力提升。
科技改變生活:當創新走出象牙塔
這項研究的意義,遠不止“搬重物”那麼簡單。
對老齡化社會來說,輕量化、低功耗的手部外骨骼可以幫助他們輕鬆提起菜籃、擰開瓶蓋,保持獨立生活能力;對於長期從事重複性體力勞動的工人來說,外骨骼技術可以分擔他們的工作負荷,減少肌肉骨骼疾病的發生。對於殘障人士,這項技術更是意義非凡。雖然目前的系統主要面向健康人羣的能力增強,但磁流變技術的高精度控制特性,使其非常適合開發康復訓練設備——通過提供可調節的阻力和輔助力,幫助患者進行鍼對性的康復訓練。
在應急救援領域,這項技術的應用前景更是尤其廣闊。地震、礦難、火災、洪水,救援人員擁有一套可靠的外骨骼系統,就可能多撐一會、多救一人,就可能就是無數家庭生與死的未來。目前,研究團隊已經與相關部門展開合作,推動技術的實用化進程。
正如孫帥帥教授所說:“我們希望這項技術不僅停留在實驗室,而是真正走向應用,幫助那些需要幫助的人。”這條道路雖然漫長,但每一步都值得期待。因爲在這條路的盡頭,是無數等待救援的生命,是千萬勞動者的健康,是科技讓生活更美好的承諾。
科技的價值在於造福人類。當磁流變材料遇上中國智慧,當基礎研究走向實際應用,我們看到的不僅是一雙機械手套,更是科技改變生活的生動詮釋。
參考文獻:
- Mai, Xianlong, et al. "Non-motorized Hand Exoskeleton for Rescue and Beyond: Substantially Elevating Grip Endurance and Strength." IEEE Transactions on Robotics (2025).
出品:科普中國
作者:李瑞(半導體工程師)
監製:中國科普博覽