水母“飛昇”,AI植入,變身深海活體計算機
你有沒有想過,一個沒有大腦、在地球上漂了5億年的古老生物,有一天會成爲一臺“活着的計算機”?
這不是科幻電影的情節。最近,一篇發表在《自然·通訊》上的研究,把水母變成一個能夠預測自己行爲、並可用於深海探索的半機械生物(Cyborg)。
生命與機器的融合,一個古老的生物正被賦予全新的使命
(圖片來源:Dai Owaki)
爲什麼要選水母?
因爲水母是“具身智能(Embodied Intelligence)”的完美典範。要理解這一概念,得從智能開始說起。
提到“智能”,我們首先想到的總是一個超級強大的中央處理器——大腦。我們認爲,是“大腦”這個指揮官,在控制着“身體”這臺相對笨拙的機器。但“具身智能”理論則提出了一個顛覆性的觀點:真正的智慧,是身體、大腦(如果存在)和環境三者互動融合的產物,而不僅僅是大腦的功勞。
換句話說,一個生物的身體,本身就是其智能的一部分。它的物理形態、材質、結構,都深度參與了“思考”和“解決問題”的過程。
現在,我們再來看論文中的主角——水母。它沒有真正意義上的大腦,只有一個簡單的神經網絡。但它卻是地球上能效最高的游泳者之一 。它的祕訣就藏在它的身體裏。
水母那看似簡單的傘狀結構,是歷經了5億年演化,爲解決“如何在水中高效移動”這個問題而形成的完美答案。
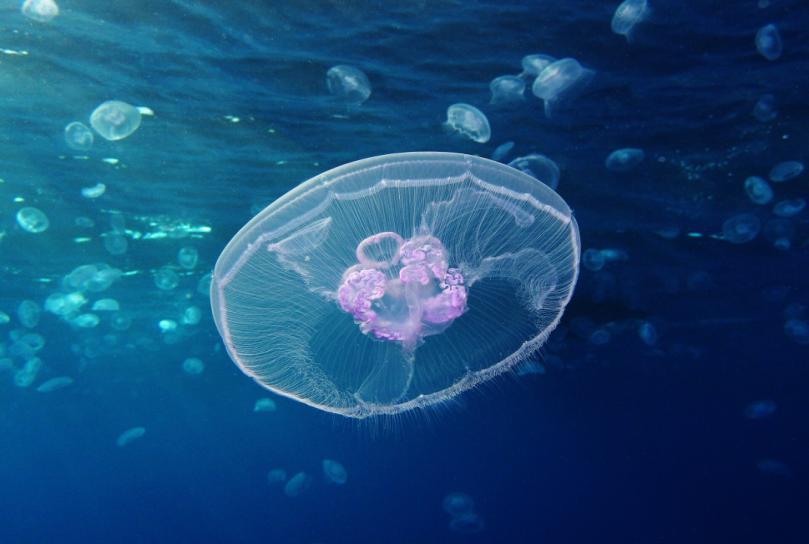
海月水母(Aurelia coerulea),一個看似簡單卻蘊含着億萬年演化智慧的生命體
(圖片來源:wikipedia)
它那看似簡單的傘狀身體,是歷經數億年演化而來的高效游泳機器。通過一次次優雅的收縮和舒張,它能以極低的能耗在水中游動。這種效率,是目前最先進的人造軟體機器人都難以企及的。題外話一下,除了水母,蟑螂也是具身智能研究中的一大熱門。
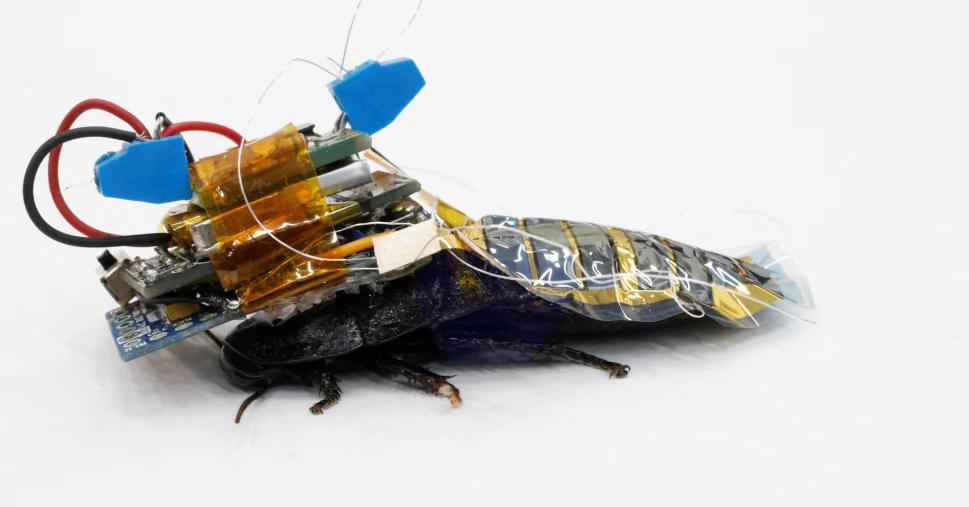
賽博蟑螂
(圖片來源:REUTERS/Kim Kyung-Hoon)
所以,科學家的思路是:與其從零開始模仿,不如直接“徵用”這個大自然已經“優化”了億年的完美系統。
如何“駕馭”一隻有5億年曆史的水母?
科學家從日本的加茂水族館獲取了海月水母(Aurelia coerulea)作爲模型動物。這些水母被飼養在專門的水族箱中,使用從800米深海抽取的天然海水,以確保它們長時間保持健康狀態。他們並沒有用複雜的機械臂控制它,而是進行了一次相對溫柔的“介入”。
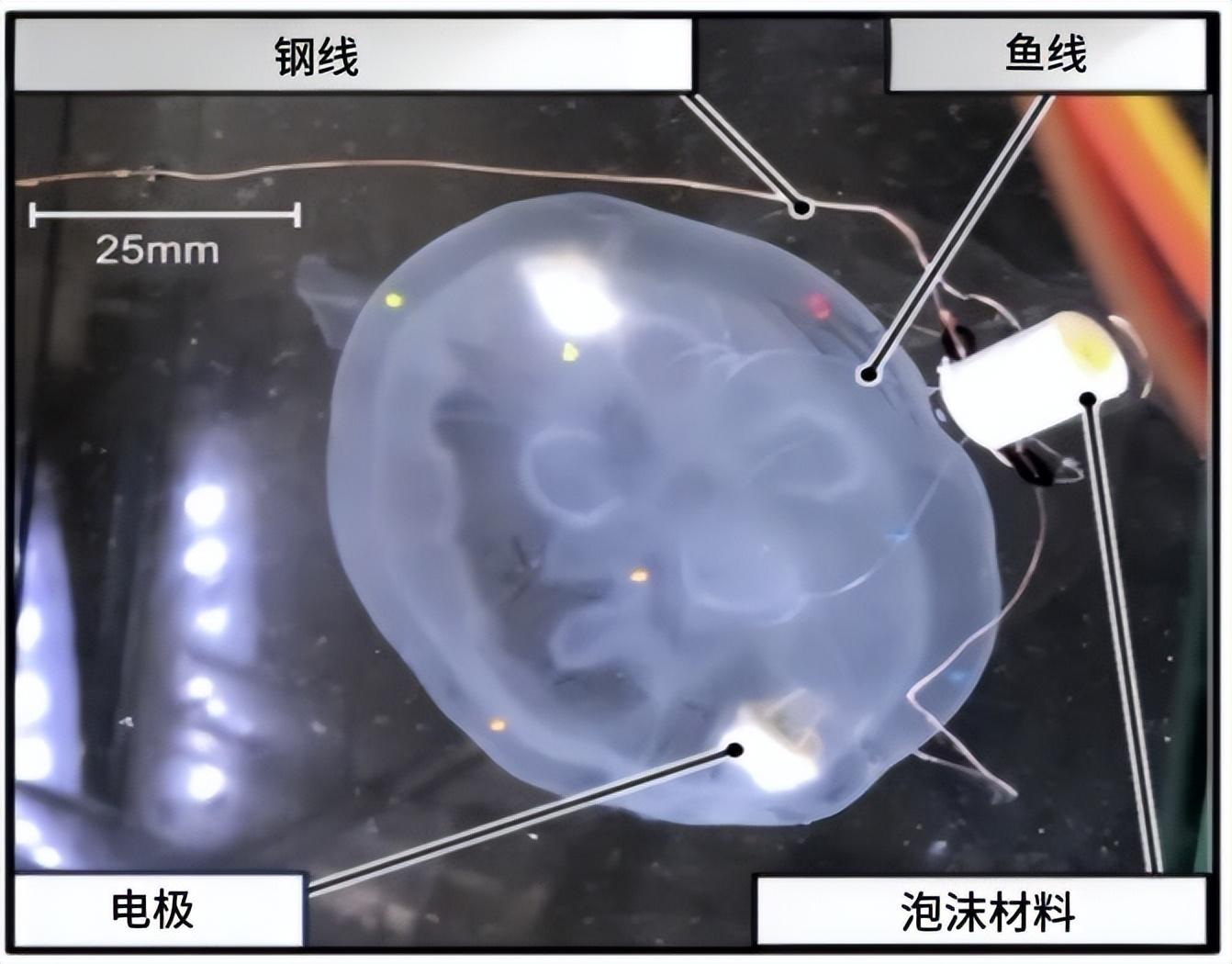
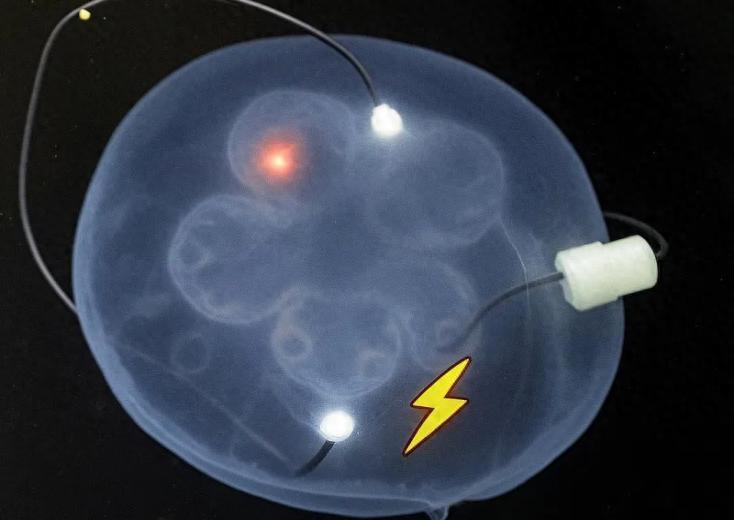
論文中的實驗裝置圖,展示了電極如何安裝在水母身上
(圖片來源:參考文獻[1])
第一步,研究人員將極其微小的電極植入到水母傘狀體下方的環狀肌肉中。
第二步,他們通過一個自制的微型設備,向這些肌肉發送一種叫做“脈衝寬度調製(PWM)”的電信號。這種信號模仿了生物體自然的神經脈衝,可以引導肌肉收縮。
第三步,由於水母身體是透明的,爲了精確追蹤它的每一個動作,研究人員在它體內植入了能在紫外光下反光的彈性標籤(VIE Tags),並通過一個3D運動捕捉系統進行全方位記錄。
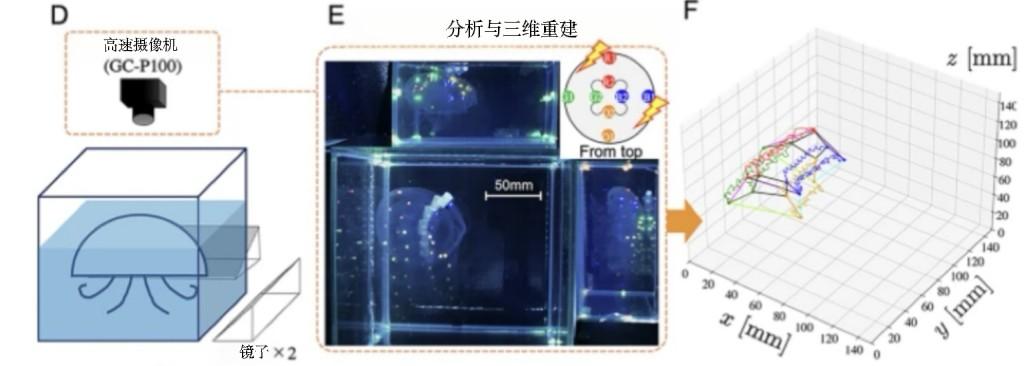
3D運動捕捉系統示意圖
D 僅用一臺從頂部拍攝的高速攝像機,並通過兩側的兩面鏡子反射,就能同時捕捉到水母的頂部、側面和正面三個視角的影像 。
E 來自三個視角的影像被輸入到一個名爲DeepLabCut (DLC)的AI分析工具中 。這個工具能自動識別並精確估計出視頻中所有發光標籤的位置。
F通過整合來自三個視角的數據,研究人員成功地在電腦中重建了水母身體在三維空間中的精確模型和運動軌跡 。
(圖片來源:參考文獻[1])
在實驗中,他們發現,並不是隨便什麼電信號都有效。當他們以1.5秒和2.0秒爲週期進行刺激時,水母的游泳行爲會變得異常協調和可預測。
這說明,他們找到了與水母自身運動節律“同頻共振”的關鍵。這更像是一種引導,而不是粗暴的遠程遙控。
最大膽的一步:讓身體去計算
接下來,就是這項研究最核心、最令人腦洞大開的部分。
一個難題是,水母太小了,你不可能在它身上綁一個強大的電腦來處理複雜的導航任務。那該怎麼辦?答案是:利用水母的身體本身進行計算。
這裏需要引入一個前沿的機器學習概念,“物理水庫計算(Physical Reservoir Computing,PRC)”。
什麼是水庫計算?想象一下,你向一個平靜的池塘裏扔進一顆石子,水面會泛起複雜的漣漪。這片漣漪,實際上蘊含了關於這顆石子(輸入信號)的所有信息,比如它的大小、形狀和入水速度。如果你能“讀取”這片漣漪,就能反推出石子的信息。“水庫計算”的原理與此類似,它利用一個複雜的物理系統(比如這個池塘)來處理信息,我們只需要讀取“結果”(漣漪)即可,大大簡化了計算過程。
在這項研究中,那隻被電刺激後不斷變形、遊動的水母,就是那個“池塘”。
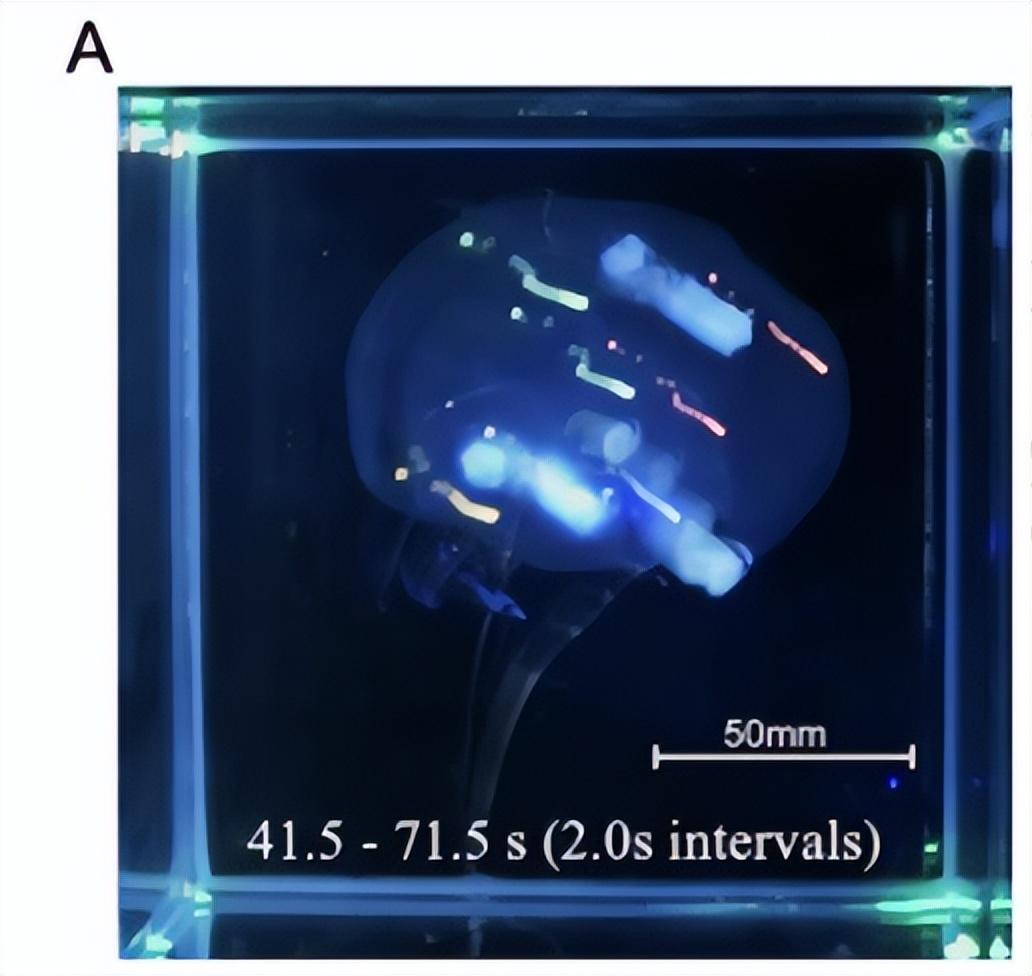
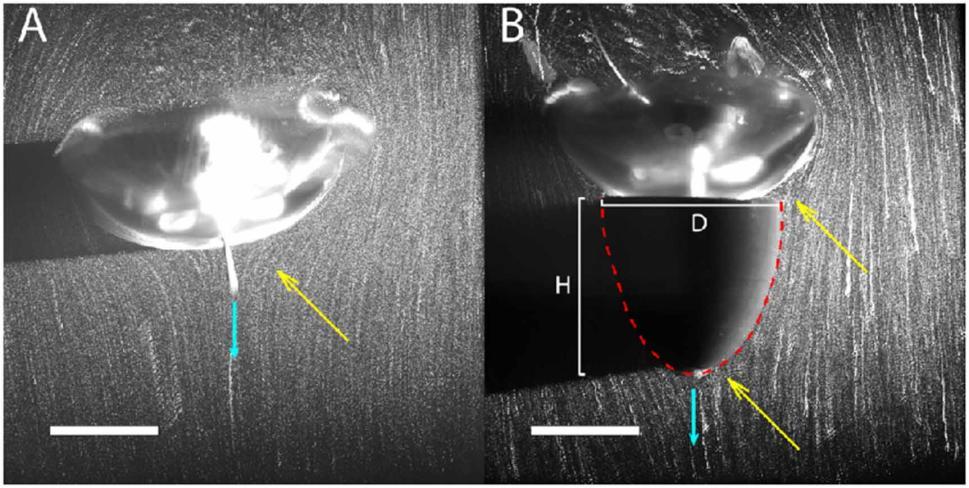
論文中電刺激下水母的運動軌跡圖:在電信號的引導下,水母身體的每一次收縮和與水流的互動,都成爲一次複雜的“物理計算”
(圖片來源:參考文獻[1])
當電信號作用於水母時,它柔軟的身體與水流之間會產生極其複雜的相互作用,產生各種形態變化(漣漪)。研究人員通過3D捕捉系統“讀取”這些身體形態變化的數據,再結合機器學習算法,竟然成功地精確預測了水母接下來的運動軌跡。
換句話說,複雜的計算過程,完全被外包給了水母的“物理身體”去自然完成。
除此之外,一個來自美國加州理工學院(Caltech)的研究團隊,他們在2023年也對海月水母進行了賽博改造。

藍色的部件就是安裝好的3D打印“帽子”,上方的小部件是控制器
(圖片來源:參考文獻[2])
爲水母3D打印的流線型“帽子”
(圖片來源:參考文獻[2])
簡單來說,他們爲水母設計了一個3D打印的流線型“帽子”,來減少水母在遊動時的阻力。這可不是一個普通的“帽子”,裏面還集成了一個微電子“起搏器”,它能向水母的游泳肌肉發送溫和的電脈衝,促使水母以比自然狀態更快的頻率收縮遊動。通過這種機電增強方法,研究團隊成功地讓水母的游泳速度提升至其自然速度的4.5倍。
這些“賽博水母”有什麼用?
這些研究的意義遠不止於“讓水母遊得更快”這麼簡單。也許未來我們不再需要派遣昂貴、笨重、高能耗的大型水下機器人去探測深海。取而代之的,是一個由成千上萬只這種半機械水母組成的“生物探測網絡”。

一隻手正在輕輕觸碰一羣在水中漂浮的水母
(圖片來源:Glenn Asakawa/University of Colorado Boulder)
它們幾乎不需要外部能源,可以自行在海洋中捕食生存;它們行動悄無聲息,不會驚擾脆弱的海洋生態;它們可以到達傳統設備難以進入的珊瑚礁縫隙或深海熱泉。它們就像是海洋原生的“巡邏兵”,默默地收集着關於溫度、鹽度、酸鹼度和污染物的寶貴數據。
當然,要實現這一切還有很長的路要走,比如如何實現更精準的轉向控制、如何集成更復雜的傳感器以及如何收集數據等等。但無論如何,這些研究打開了一扇全新的大門。
參考文獻:
[1] Owaki D, Austin M, Ikeda S, et al. Harnessing natural embodied intelligence for spontaneous jellyfish cyborgsJ. Nature Communications, 2025, 16(1): 4642.
[2] Anuszczyk S R, Dabiri J O. Electromechanical enhancement of live jellyfish for ocean explorationJ. Bioinspiration & Biomimetics, 2024, 19(2): 026018.
出品:科普中國
作者:蘇澄宇(科普創作者)
監製:中國科普博覽