尷尬!日本登月竟然頭部先着地!跳跳機器人發現不對勁

給你10億個腦洞,你也絕對想不到,世界上第五個登月國家的着陸器,竟然是以一種極爲特殊,任何人都沒有想到的方式登陸的。更令人驚歎的是,即使是在如此艱難的情況下,着陸器還是釋放了兩個小機器人,開始正常地履行任務,同時拍下了自己尷尬的一幕。
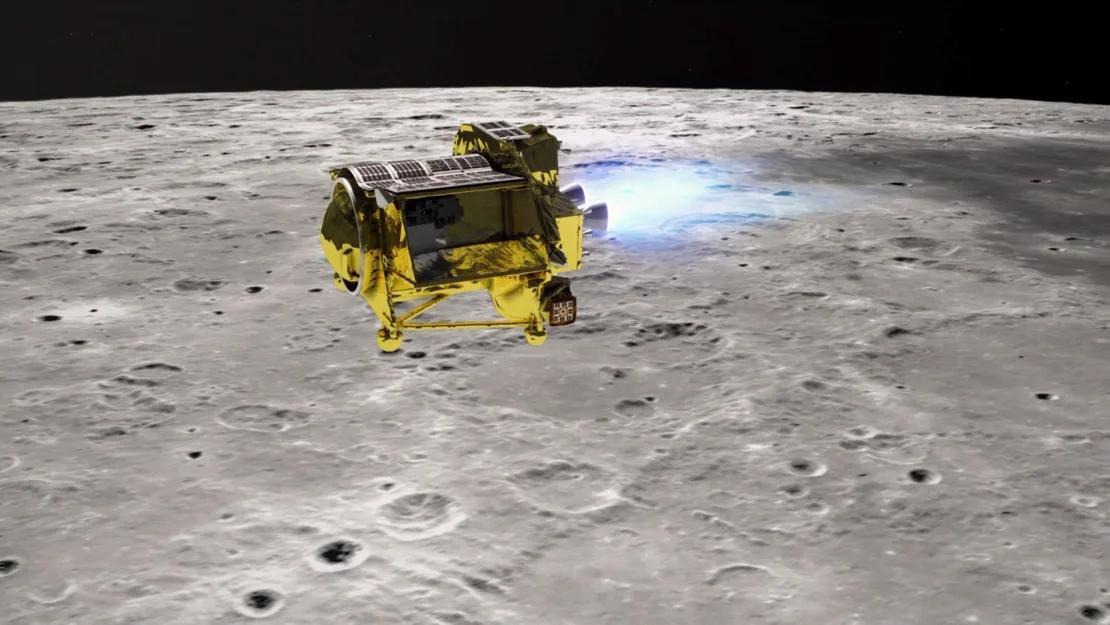
1月20日凌晨,日本小型月球探測器,又名“月球狙擊手”的機器人,在經歷4個半月的長途跋涉後,終於成功登陸月球,成爲繼蘇、美、中、印後,第五個將航天器軟着陸在月球上的國家。然而科學家們很快就發現不對勁了,電池電量怎麼直線下降?這意味着電池根本沒有得到補充!
好在兩個小機器人已經從着陸器上正常釋放出來了,科學家們一邊緊張地尋找電池不補充電量的原因,一邊操作兩個機器人執行既定任務,看看它們能不能拍到着陸器是怎麼回事。
通過遙測傳回的數據,科學家們得到的唯一信息是,着陸器的太陽能電池板面向西方,這讓它無法接受陽光,但這又給了科學家們一個希望,因爲隨着太陽在月球上空的移動,陽光最終可能照到太陽能電池板,從而爲它補充電量,但月球的一個白天有地球上14天那麼漫長,陽光要從西面照到太陽能電池板需要漫長的時間,科學家們不得不在着陸器電量只剩12%時關閉了它,看看後面還能不能充上電。
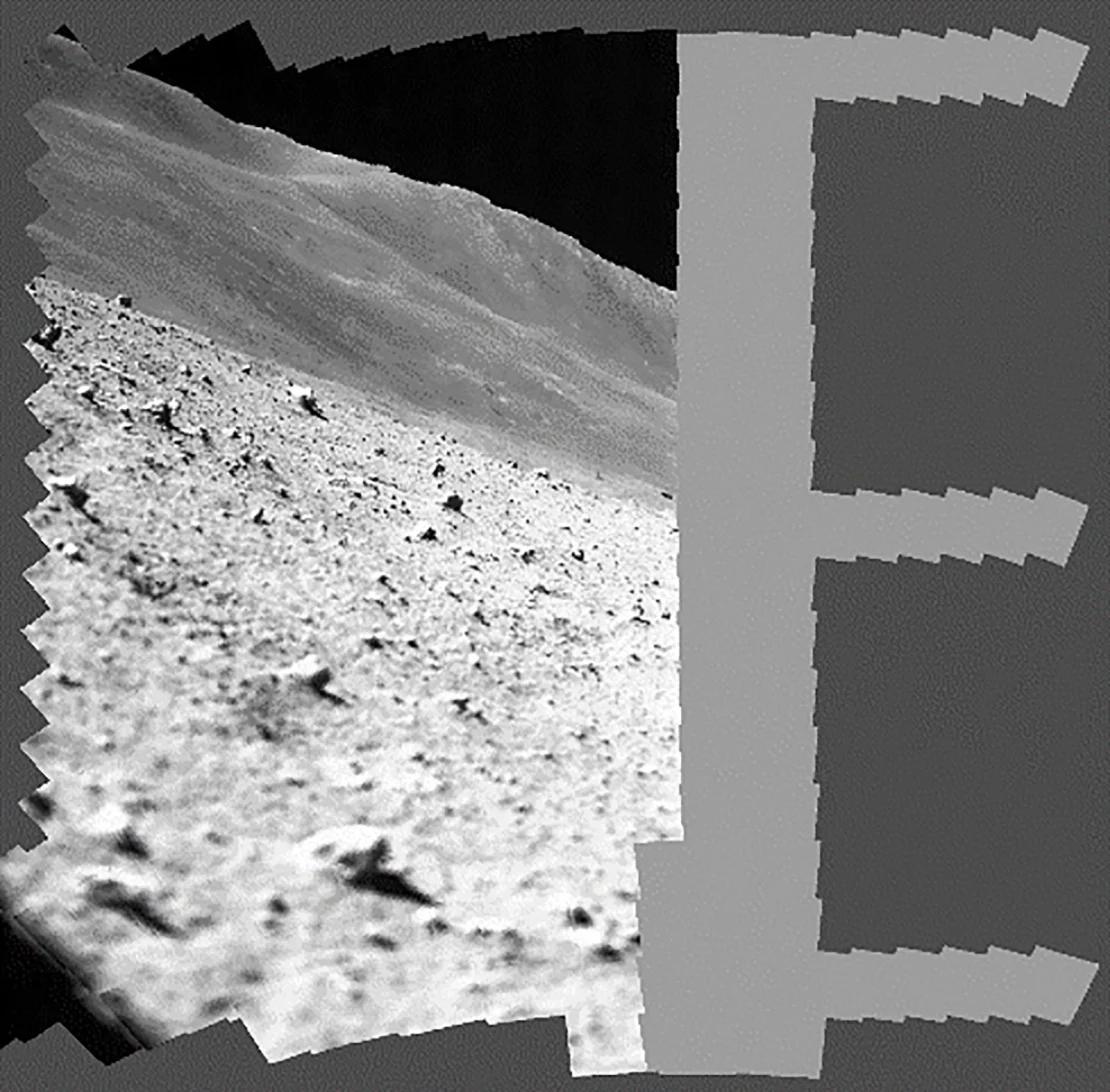
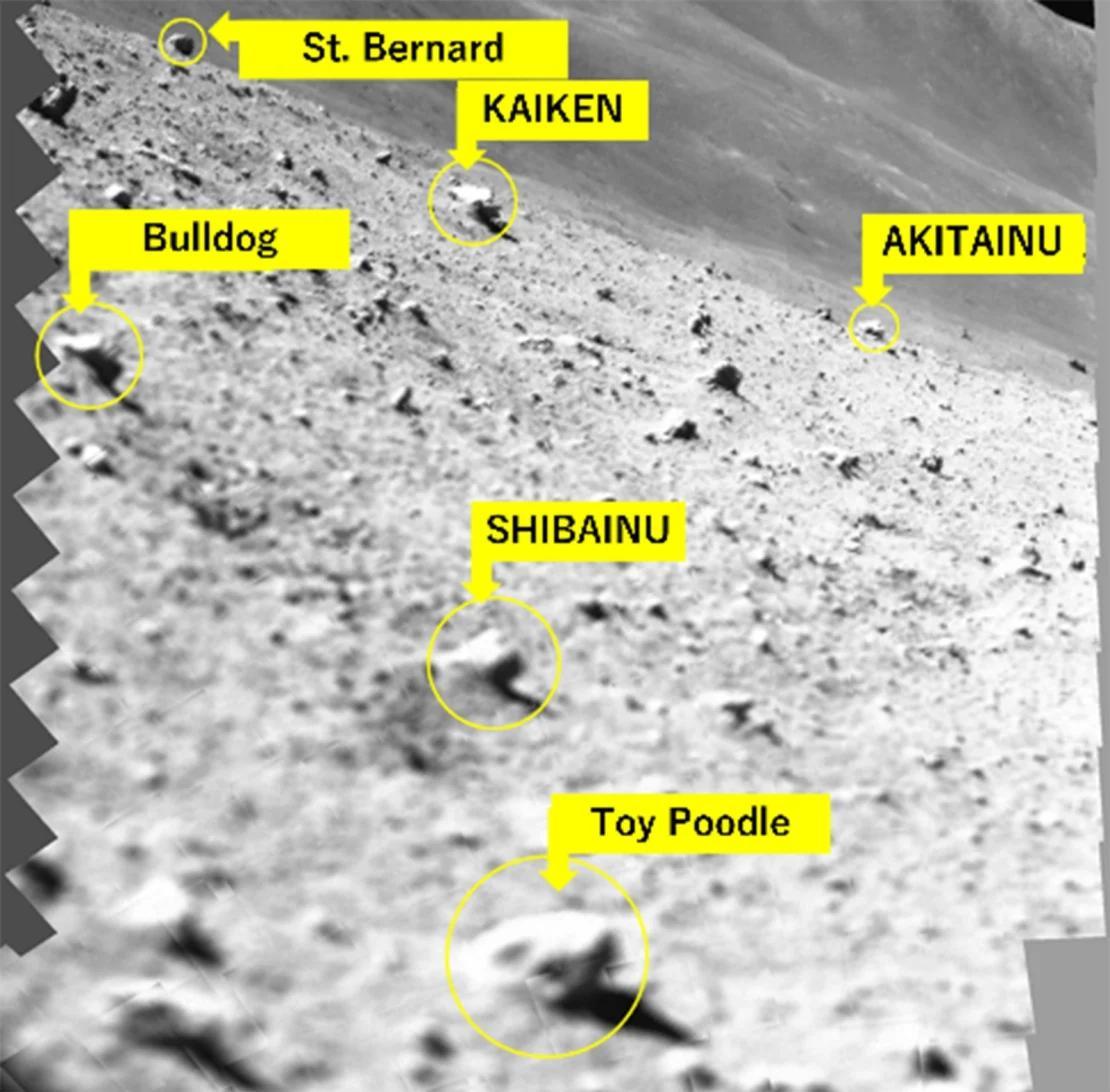
好在小機器人LEV-1漫遊車也配備了通信系統,可以和地球直接聯繫,它可以在月面跳躍行進,並拍攝周圍的低分辨率照片。LEV-1最終在數天內拍攝了257張照片並傳回地球,科學家們將照片拼接在一起後,終於發現了一個讓他們瞠目結舌,完全意想不到的情景:着陸器竟然是大頭朝下,四腳朝天着陸的,怪不得太陽能電池板接收不到陽光!

這可能是太空探索史上最奇葩的軟着陸方式了吧,科學家們檢查數據後發現,可能是在離月面還有50米時,着陸器的一個推進器噴嘴異常關機,導致姿態失控,最終一頭栽向了月面。
不過月球狙擊手還是創造了幾個紀錄,除了是全球第五,本世紀中印之後第三個登陸月球的國家外,它還是最精確着陸的探測器,位置誤差離預定僅55米,證明這次開發的精確着陸技術是成功。由於月球上沒有GPS,此前登陸的探測器包括阿波羅飛船,都只能月面大致區域着陸,甚至誤差幾公里,也就是在“能着陸的地方着陸”。

而月球狙擊手是要在“想着陸的地方着陸”,爲此它採用月面識別技術,通過下降過程中不斷拍攝照片和此前月球軌道器獲得的數據對比來調整着陸方向,希望實現100米以內的高精度着陸,顯然這個最大的目標已順利達成,而且是在一個主力推進器失效的情況下。
另外,LEV-1、LEV-2一起成爲日本首個月球漫遊機器人,LEV-1以跳躍方式行進,LEV-2則以變形方式前進,可謂腦洞大開。由於LEV-1可以和地球直接通信,它也被認爲是有史以來最小、最輕但距離最長的直接數據傳輸案例。
那麼這幾個小機器人未來命運是什麼呢?LEV-1的電量已經耗盡,目前處於待機模式,科學家們仍在監聽它的信號,等待太陽出來後充電,LEV-2的狀態目前尚不明朗。而着陸器科學家們仍然沒有放棄,希望它能捱過寒冷的月夜,在太陽重新升起的時候能夠充上電。