理想汽車發佈下一代自動駕駛基礎模型MindVLA-o1
來源:
更新:
【CNMO科技消息】3月17日,理想汽車發佈下一代自動駕駛基礎模型MindVLA-o1。據CNMO瞭解,MindVLA-o1通過五大技術創新,讓自動駕駛看得更遠、想得更深、行得更穩、進化更快、部署更高效。

理想汽車基座模型負責人詹錕表示:“當我們把視覺、語言和行動統一到一個模型中時,它已不再只是自動駕駛模型,而是在逐漸演化爲面向物理世界的通用智能體。基於同一套VLA模型,不僅可以控制車輛,也能夠擴展到機器人。因此,自動駕駛只是物理AI的起點,未來這類基礎模型將驅動新的具身智能範式”。
據CNMO瞭解,2025年,理想汽車將空間理解、語言理解與行動決策統一到同一模型框架,構建了基於VLA、世界模型與強化學習三大技術棧的VLA司機大模型,並於8月隨理想i8交付正式推送,9月向AD Max用戶全量推送。截至2025年底,VLA司機大模型月使用率達到80%,VLA指令累計使用1225.4萬次;春節期間理想輔助駕駛總里程達2.5億公里,VLA指令使用次數達130.3萬次。
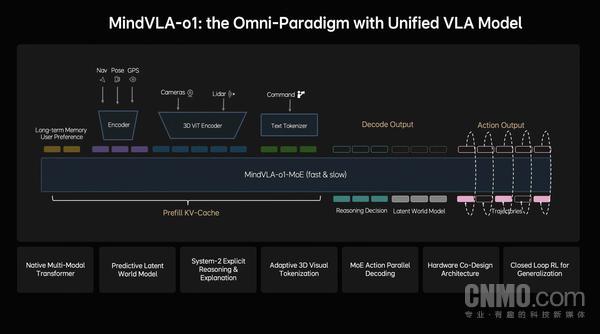
理想汽車MindVLA-o1以原生多模態MoE Transformer爲核心,通過五大技術創新——3D空間理解、多模態思考、統一行爲生成、閉環強化學習(Closed-loop RL)和軟硬件協同設計(Hardware–Software Co-Design),構建了面向物理世界智能的自動駕駛基礎模型。
相關推薦

















